Demo of the model workflow.
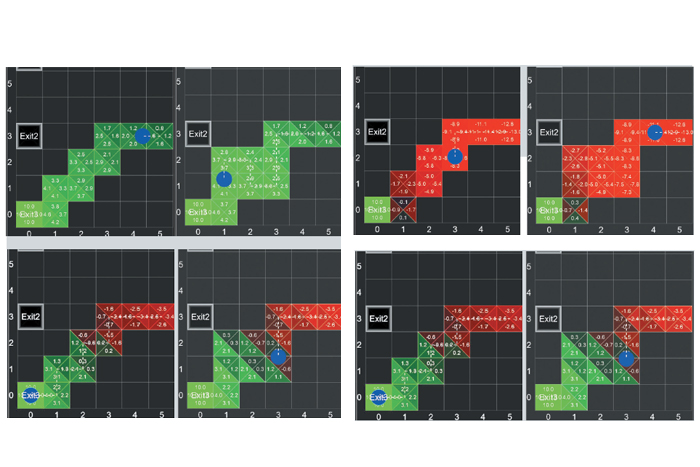
Registry of Cultural Herital Site.
Here is a breakdown of the integration of skills: programming - C# - Python modeling
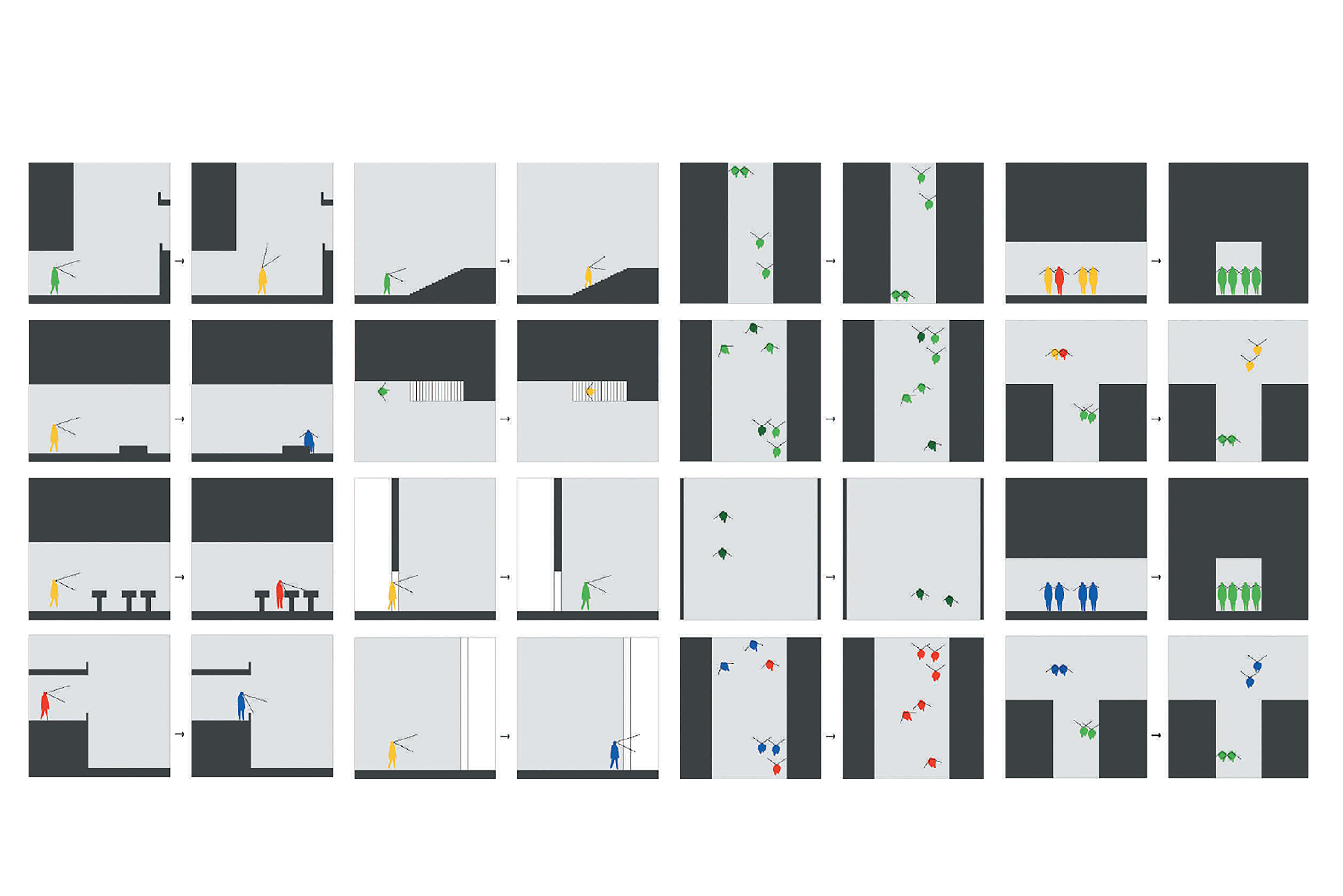
Demo of the model workflow.
Registry of Cultural Herital Site.
Here is a breakdown of the integration of skills: programming - C# - Python modeling